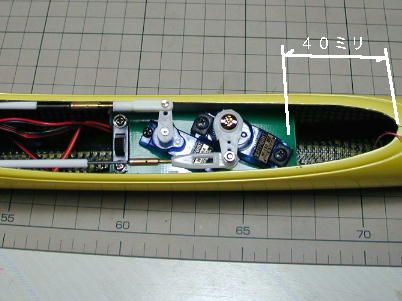
 儊僇僾儗乕僩偺愙拝偱偡丅 廳検偺偁傞僒乕儃偼弌棃傞偩偗慜偵忔偣偨偐偭偨偺偱丄偙偺埵抲偲側傝傑偟偨丅 僒乕儃僩儗僀偼侾丏俆儈儕偺俥俼俹斅偐傜丄幚嵺偵僒乕儃傪忔偣偰僔儈儏儗乕僔儑儞 偟偨忋偱埵抲寛傔傪偟偰愗傝弌偟傑偟偨丅丂偙偺俥俼俹斅偼丄夛幮偺嶻攑抲偒応偐 傜尒偮偗偰偒偨僾儕儞僩婎斦偱偡丅丂  崅擲搙偺弖娫愙拝嵻偱壖巭傔傪偟偨屻偵丄儅僀僋儘僶儖乕儞僄億僉僔傪惙偭偰曗 嫮偲偟偰偄傑偡丅丂儅僗僉儞僌僥乕僾傪揬偭偰巇忋偘傞偲鉟楉偵弌棃傑偡丅 偙偺儊僇埵抲偼庴怣婡傪僒乕儃偺屻傠偵抲偔儗僀傾僂僩偱偡丅丂庴怣婡傪僲乕僘偵 愊傓偺偱偁傟偽丄傕偆彮偟僒乕儃偺搵嵹埵抲傪屻傠偵壓偘傞昁梫偑偁傝傑偡丅 丂 |
 儔僟乕偲僄儗儀乕僞乕儕儞働乕僕梡偺僺傾僲慄偺愭偵傾僕儍僗僞乕傪僴儞僟晅偗偟 傑偡丅丂偒偭偪傝偲僴儞僟偑夞傜側偄偲嫮搙晄懌偱庢傟偰偟傑偆偙偲偑偁傞偨傔丄 傾僕儍僗僞乕偵彫寠傪奐偗偰僴儞僟偺摝偘偵偟傑偡丅  儔僟乕偺儕儞働乕僕僺傾僲慄偼敳偒庢傞帠偑弌棃傞偺偱敳偄偰嶌嬈傪偡傟偽椙 偄偺偱偡偑丄僄儗儀乕僞乕梡偺僺傾僲慄偼敳偗傑偣傫偺偱丄摲懱偵庢傝晅偗偨 傑傑僴儞僟晅偗嶌嬈傪偟側偄偲偄偗傑偣傫丅丂夋憸偺條偵丄曻擬僋儕僢僾傪晅偗偰 僼儗僉僔僽儖僷僀僾偑曄宍偟側偄傛偆偵偟傑偡丅 儁乕僗僩傪彮検晅偗偰丄摝偘梡偺寠偐傜僴儞僟偑暒偄偰偔傞傛偆偵側傟偽愙崌偼 俷俲偱偡丅 |
 僒乕儃偼塃偐傜僄儗儀乕僞乕梡偺倂倎倷倫倧倝値倲丂倂亅侾俆侽俵俧丄儔僟乕梡偺摨 倂亅俉係偱偡丅丂儔僟乕偼捠忢偺傾僕儍僗僞乕傪巊偭偰偄傑偡偑丄僄儗儀乕僞乕偼 儃乕儖僕儑僀儞僩傪巊偄傑偟偨丅丂僒乕儃偺崅偝偺堘偄偐傜丄僄儗儀乕僞乕僒乕儃偺 儃乕儖僕儑僀儞僩偼僒乕儃儂乕儞偺壓懁偵庢傝晅偗偰偁傝傑偡丅 僶僢僥儕乕偼扨巐僒僀僘偺俶倝俵倛俉侽侽倣俙倛偺暔傪俆僙儖僷僢僋偵偟偰僲乕僘偵擺 傔偰偄傑偡丅丂揹尮僗僀僢僠偼儊僇僾儗乕僩偵屌掕偟偰偄傑偡丅丂偙偺僗僀僢僠偼揹婥 偺僷乕僣壆偝傫偱侾屄俉侽墌偱攦偄傑偟偨丅丂廩揹梡偺僐僱僋僞乕傕弌偟偰偄傑偡丅  僉儍僲僺乕偺屌掕偼俀儈儕偺僇乕儃儞儘僢僪偱偡丅 |
 儔僟乕偺儕儞働乕僕偼愭抂傪俋侽搙偵嬋偘偰嵎偟崬傫偱偄傞偩偗偱偡丅丂 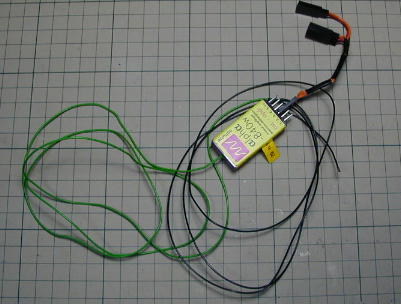 傾儞僥僫慄偼丄俀攞偵墑挿偟偰僥乕儖晹暘偐傜俀侽侽儈儕傎偳悅傜偟偰偄傑偡丅 偙偺婡懱偵巊偭偨庴怣婡偼僔儏儖僣偺俉係侽亅倂偲尵偆婡庬偱丄揹攇忈奞側偳偺 帪偼俹俠俵庴怣婡偺條偵摦嶌偟偰偔傟傑偡丅丂偱偡偑丄媽宆偺堊偵俆乣俈俠俫偑曄 傢偭偨弌偟曽傪偟偰偄傑偡丅丂偦偺堊偵丄摿庩側僴乕僱僗傪嶌傞昁梫偑偁傝傑偟偨丅 |