 |
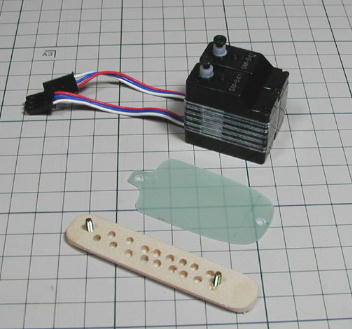
| 偄傛偄傛儊僇愊傒偱偡丅 庤尦偵偁偭偨僒乕儃丄僒儞儚偺俽俵俆係侾偱偡丅丂偙偺僒乕儃丄側偤偐尦乆帹偑晅偄偰偄傑偣傫 偺偱僒乕儃僩儗僀曽幃偼巊偊傑偣傫丅丂巇曽偑側偄偺偱俀屄偺僒乕儃傪椉柺僥乕僾偲 僌儔僗僥乕僾偱傑偲傔偰摲懱偵庢傝晅偗傞偙偲偵偟傑偟偨丅 偨偩丄摲懱掙晹偼娵偔側偭偰偄偰丄僒乕儃偺暆偺暯柺傕偁傝傑偣傫偺偱丄儀乕僗傪嶌惉偟傑偟偨丅 堦斣壓偵幨偭偰偄傞儀乕僗傪摲懱偵愙拝丄恀傫拞偵幨偭偰偄傞僾儗乕僩偵僒乕儃傪椉柺僥乕僾偱 屌掕偟偰丄儀乕僗偵偹偠巭傔偡傞嶌愴偱偡丅丂 |
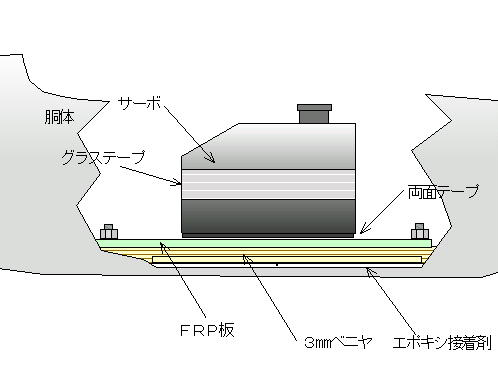 |
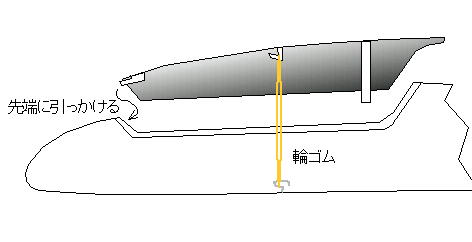
| 恾愢偡傞偲偙傫側姶偠偱偡丅僒乕儃僩儗僀曽幃偺曽偑摲懱偑偟偭偐傝偟偰椙偄偺偱偡偑 巇曽偁傝傑偣傫丅丂嫮偄偰忋偘傟偽僒乕儃偺扙拝偑梕堈丏丏偭偰偲偙傠偱偟傚偆偐丅 |
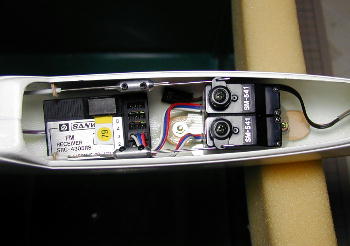 |
| 庢傝晅偗傞偲偙傫側姶偠偱偡丅 擇愄傕慜偺儊僇偱偡偑丄偍偐偘偱僂僄僀僩傪愊傑側偔偰嵪傒偦偆偱偡丅 偙偺庤偺姰惉婡偼僥乕儖僿價乕偵側傝偑偪偱偡偺偱丄儊僇偼弌棃傞偩偗慜偵丄 僥乕儖偼弌棃傞偩偗寉偔偑揝懃偱偡丅 |
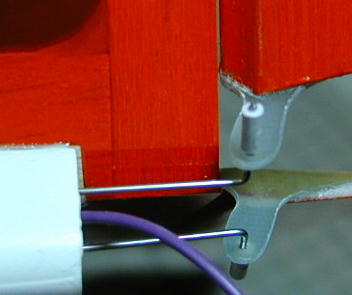 |
| 僐儞僩儘乕儖儂乕儞晹偺倀俹偱偡丅 俴帤偵嬋偘偨僺傾僲慄傪嵎偟丄僾儔僷僀僾傪弖娫愙拝嵻偱寉偔愙拝偟偰敳偗杊巭偵偟偰偄傑偡丅 僥儞僔儑儞偑妡偐偭偰偄傞偺偱晛捠偺忬懺偱偼敳偗傞偙偲偼柍偄偲巚偄傑偡偑丄曐尟偩偲巚偭偰 庢傝晅偗傑偟偨丅 懬妏偼僄儗儀乕僞乕倀俹丆俢俷倂俶嫟偵俉噊丄儔僟乕倀俹丆俢俷倂俶嫟偵侾侽噊偵愝掕偟傑偟偨丅 |
 |
| 僉儍僲僺乕偼愭抂晹暘偵僲僢僠傪丄拞墰偵屌掕梡偺僐並儉妡偗丄屻晹偵峀偑傝杊巭媦傃埵抲寛傔 梡偺僷乕僣傪俥俼俹斅偐傜愗傝弌偟庢傝晅偗傑偟偨丅 僉儍僲僺乕偺棤偵乭俲俵俲丂倣倧倓倕倢乭偺崗報偑尒偊傑偡丅 |
 |
| 偙偺條偵庢傝晅偗傑偡丅 僉儍僲僺乕偼僶僢僥儕乕偺廩揹丄僗僀僢僠偺俷俶亅俷俥俥側偳偱奐暵偡傞梊掕偱偡丅 娙扨偵奐偗暵傔偱偒丄偟偐傕妋幚偵暵傑傞昁梫偑偁傝傑偡丅 僥乕僾側偳偱娙堈偵屌掕偡傞偺傕椙偄偱偟傚偆丅 |